ecosnos.ru

|
ecosnos.ru |
|
|
Главная Управляемые энергетические установки 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 [ 141 ] 142 143 144 145 146 147 148 149 150 151 152 153 ДУ работает по следующей схеме. При отходе от третьей ступени и переводе боевой ступени в новую точку прицеливания на маршевом режиме питающий поток тянущего сопла полностью заперт. В толкающем сопле за счет определенной подачи газа управляющего потока создается такая эффективная площадь критического сечения, которая вместе с площадью утечек закрытого тянущего сопла обеспечивает работу ДУ на режиме максимального давления (расхода). Управление боевой ступенью на этом режиме по каналам тангажа и рыскания осуществляется благодаря перераспределению газа между толкающими соплами противоположных клапанных блоков. Управляющий момент по каналу крена создается соплами крена двух противоположных клапанных блоков. Сопла двух других блоков в это время закрыты. Разворот боевой ступени на новую цель (перенацеливание) происходит по моментной схеме на управляющем режиме. При этом питающий поток тянущего сопла одного блока и толкающего сопла противоположного блока закрыт, а в других соплах этих блоков за счет уменьшен расхода газа управляющего потока (по сравнению с расходом на маршевом режиме) создается такая эффективная площадь кррггического сечения, которая в сумме с площадью утечек закрытых сопл обеспечивает работу ДУ на режиме минимального давления (расхода). Доводка скорости и координат боевой ступени до расчетного значения перед сбросом каждого боевого блока производится на управляющем режиме в два этапа: предварительно при работе толкающих сопл непосредственно после маршевого режима и окончательно при работе тянущих сопл после проведения маневра перенацеливания. Отход боевой ступени от сброшенного боевого блока происходит также на управляющем режиме при работе тянущих сопл. Управление по каналам тангажа и рыскания на этом этапе доводки и отхода осуществляется за счет перераспределения расхода газа между противоположными работающими соплами. На управляющем режиме управляющие моменты по каналу крена создаются соплами крена всех четырех блоков. ДУ имеет следующие основные характеристики: глубину изменения давления в камерах сгорания газогенераторов р =3,3 МПа / 1,2 МПа 2,75; глубину регулирования силы тяги Р - 1,7; температуру продуктов сгорания Т= 1925 К; массу двух топливных зарядов Мт = 193 кг; общее время работы ДУ на двух режимах / = 420 с; массу снаряженной ДУ Mz = 295 кг; коэффшщент массового совершенства 0,53; коэффициент баллистической эффективности Л^б = 1170 м/с. Исследования показали, что данная ДУ обладает невысокой энергобаллистической эффективностью при низком значении достигнутой глубины регулирования. Расчеты показывают, что с увеличением глубины регулирования модуля тяги Р увеличивается эффективность использования топлива (рис. 10.3). Из графика видно, что применение двигателя боевой ступени с глубиной регулирования тяги Р = 6 ... 7 вместо 1,7 снижает затраты топлива, по сравнению с двигателем с нерегулируемой по величине тягой, приблизительно на 30 %. 1,15 0,95
7 9 Р Рис 10J. Зависимость относительного запаса топлива относительного времени работы / ДУ от расчетной глубины регулирования тяги Р 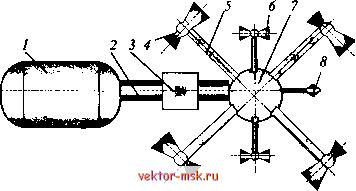 Рис 10.4. Принципиальная схема АРД: 1 - газогенератор с зарядом твердого топлива и воспламенителем; 2 - газовод; 3 - стабилизатор давления; 4 - сопловой управляющий блок по каналам тангажа и рыскания; 5 - газоход; 6 - сопловой управляющий блок по каналу крена; 7 - ресивер; 8 - предохранительный клапан Согласно расчетам, проведенным для ДУ РГЧ ракеты, аналогичной ракете Минитмен-ЗА , оснащенной тремя боевыми блоками, в случав применения системы внепшетраекторной коррекщш общее время работы ДУ необходимо увеличить на 100 ... 150 с при Р = 15 ... 30 для проведения нескольких сеансов связи с внепши-ми объектами. Существенно, по сравнению с ДУ РГЧ ракеты Трайдент , позволяет повысить точность стрельбы так называемый авторегулируемый двигатель на твердом топливе (АРД). Принщ1пиальная схема АРД показана на рис. 10.4. В АРД газогенератор / может иметь одну или несколько газосвязанных камер сгорания, которые могут работать параллельно или последовательно. Стабилизатор давления 3 предназначен для поддержания давления газа в ресивере 7, т.е. практически перед соплами управляющих блоков 4 и б, в заданных пределах независимо от секундно-массового расхода газа через сопла как на ста-щюнарных режимах (маршевом и управляющем), так и при смене |















